


选型指南
型号 Mode | 两相闭环步进驱动器SD-808E |
输入电压 Power Supply | AC:18~80V DC:24-110V |
最大峰值电流 Maximum peak current | 6.0A |
控制功能 Control Modes | 脉冲+方向 |
细分 Subdivisions | 400~51200 |
控制信号接口电平 Control Signal Voltage | 5-24VDC |
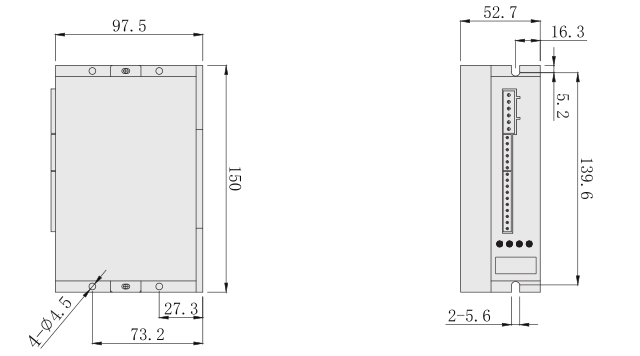
机械尺寸 Domensions | 97*150*53mm |
报警代码
报警代码 | 故障名称 | 故障内容 |
ER01 | 过电流 | 电机电流过大 |
ER02 | 超速 | 电机电流超过限制值(最大3000转/分) |
ER03 | 位置超差 | 位置偏差计数器的数值超过设定值 |
ER04 | 驱动器过热 | 驱动器温度超过设定值(最高80℃) |
ER05 | 直流过压 | 主电路电压输入超过设定值 |
ER06 | EPROM错误 | EPROM读写时错误 |
ER07 | 编码器故障 | 编码器接线错误 |
ER08 | 电机连接故障 | 电机接线错误或电机有短线 |
当出现故障时,请根据故障代码做相应的处理, ENA 信号有效,驱动器 将清除所有故障;驱动器重新上电也能清除故障报警。
驱动器内部细分表(P001 内部的值)
细分数 | SET | 2 | 4 | 5 | 8 | 10 | 16 | 20 | 25 |
细分数 | 32 | 40 | 50 | 64 | 100 | 128 | 200 | 256 |
上位机在计算脉冲当量时请用上面表格的细分数*200,得到单位为脉冲/转的细分值。
闭环驱动系统不能简单的以更换电机线来改变电机的运转方向,如果电机 运行方向与给定方向不一致时,
更改参数 P002 里的值来进行换向。
参数设定表
参数 | 名称 | 参数范围 | 说明 |
P000 | 控制参数 | 用于修改系统的性能参数 | |
P001 | 细分选择 | Set, 2-256 | 16档通用细分,1档任意细分 |
P002 | 电机运行方向选择 | 0,1 | 电机正反方向设定 |
P003 | 电机类型选择 | 57,86 | 57/60,86法兰电机 |
P004 | 位置超差限定值 | 1-9999 | 系统默认4000 |
P005 | 锁定电流百分比 | 0-100% | 系统默认50% |
P020 | 输入脉冲数低4位 | 用于显示外部输入脉冲累计总数,分开查看高低8位 | |
P021 | 输入脉冲数搞4位 | ||
P100 | 运行电流百分比 | 10-120% | * |
P101 | 电流环比列系数 | 1-1000 | 出厂设置,禁止修改 |
P102 | 电流环积分系数 | 1-1000 | 出厂设置,禁止修改 |
P103 | 电流环阻尼系数 | 1-1000 | 出厂设置,禁止修改 |
P104 | 速度环比列系数 | 1-1000 | * |
P105 | 速度环积分系数 | 1-1000 | * |
P106 | 位置环比列系数 | 1-1000 | * |
P107 | 速度环前馈系数 | 1-1000 | * |
P108 | 驱动器内部使能 | 0,1 | * |
P109 | 速度环阻尼系数 | 1-100 | * |
P112 | 共振系数 | 1-12 | 默认值为6 |
P200 | 运行模式选择 | 0.1 | 位置模式为0,速度模式为1 |
P201 | 加速设定 | 默认60 | 速度模式,驱动器转速 转/分 |
P202 | 加减速时间 | 100ms | 速度模式,加减速时间,ms |
指示灯引脚功能说明
标记符号 | 功能 | 注释 |
PWR ALM | 故障及电压指示灯 | 详见报警代码表 |
PUL+ | 脉冲正输入 | 输入电压范围5˜24V |
PUL- | 脉冲负输入 | 输入电压范围5˜24V |
DIR+ | 方向正输入 | 输入电压范围5˜24V |
DIR- | 方向负输入 | 输入电压范围5˜24V |
EN+ | 使能正输入 | 该信号有效时,电机处于自由状态 |
EN- | 使能负输入 | 该信号有效时,电机处于自由状态 |
V+ | 电源正极 | DC:24˜110V(注意不要接反) AC18˜80V |
V- | 电源负极 | DC:24˜110V(注意不要接反) AC18˜80V |
ALM+ | 报警信号正输出 | 驱动器故障保护后输 出信号给上位机 |
ALM- | 报警信号负输出 | |
Pend+ | 到位信号正输出 | 电机到位后驱动器输出信号给上位机 |
Pend- | 到位信号负输出 |
外形尺寸图(单位:mm)


选型指南
型号 Mode | 两相闭环步进驱动器SD-808E |
输入电压 Power Supply | AC:18~80V DC:24-110V |
最大峰值电流 Maximum peak current | 6.0A |
控制功能 Control Modes | 脉冲+方向 |
细分 Subdivisions | 400~51200 |
控制信号接口电平 Control Signal Voltage | 5-24VDC |
机械尺寸 Domensions | 97*150*53mm |
报警代码
报警代码 | 故障名称 | 故障内容 |
ER01 | 过电流 | 电机电流过大 |
ER02 | 超速 | 电机电流超过限制值(最大3000转/分) |
ER03 | 位置超差 | 位置偏差计数器的数值超过设定值 |
ER04 | 驱动器过热 | 驱动器温度超过设定值(最高80℃) |
ER05 | 直流过压 | 主电路电压输入超过设定值 |
ER06 | EPROM错误 | EPROM读写时错误 |
ER07 | 编码器故障 | 编码器接线错误 |
ER08 | 电机连接故障 | 电机接线错误或电机有短线 |
当出现故障时,请根据故障代码做相应的处理, ENA 信号有效,驱动器 将清除所有故障;驱动器重新上电也能清除故障报警。
驱动器内部细分表(P001 内部的值)
细分数 | SET | 2 | 4 | 5 | 8 | 10 | 16 | 20 | 25 |
细分数 | 32 | 40 | 50 | 64 | 100 | 128 | 200 | 256 |
上位机在计算脉冲当量时请用上面表格的细分数*200,得到单位为脉冲/转的细分值。
闭环驱动系统不能简单的以更换电机线来改变电机的运转方向,如果电机 运行方向与给定方向不一致时,
更改参数 P002 里的值来进行换向。
参数设定表
参数 | 名称 | 参数范围 | 说明 |
P000 | 控制参数 | 用于修改系统的性能参数 | |
P001 | 细分选择 | Set, 2-256 | 16档通用细分,1档任意细分 |
P002 | 电机运行方向选择 | 0,1 | 电机正反方向设定 |
P003 | 电机类型选择 | 57,86 | 57/60,86法兰电机 |
P004 | 位置超差限定值 | 1-9999 | 系统默认4000 |
P005 | 锁定电流百分比 | 0-100% | 系统默认50% |
P020 | 输入脉冲数低4位 | 用于显示外部输入脉冲累计总数,分开查看高低8位 | |
P021 | 输入脉冲数搞4位 | ||
P100 | 运行电流百分比 | 10-120% | * |
P101 | 电流环比列系数 | 1-1000 | 出厂设置,禁止修改 |
P102 | 电流环积分系数 | 1-1000 | 出厂设置,禁止修改 |
P103 | 电流环阻尼系数 | 1-1000 | 出厂设置,禁止修改 |
P104 | 速度环比列系数 | 1-1000 | * |
P105 | 速度环积分系数 | 1-1000 | * |
P106 | 位置环比列系数 | 1-1000 | * |
P107 | 速度环前馈系数 | 1-1000 | * |
P108 | 驱动器内部使能 | 0,1 | * |
P109 | 速度环阻尼系数 | 1-100 | * |
P112 | 共振系数 | 1-12 | 默认值为6 |
P200 | 运行模式选择 | 0.1 | 位置模式为0,速度模式为1 |
P201 | 加速设定 | 默认60 | 速度模式,驱动器转速 转/分 |
P202 | 加减速时间 | 100ms | 速度模式,加减速时间,ms |
指示灯引脚功能说明
标记符号 | 功能 | 注释 |
PWR ALM | 故障及电压指示灯 | 详见报警代码表 |
PUL+ | 脉冲正输入 | 输入电压范围5˜24V |
PUL- | 脉冲负输入 | 输入电压范围5˜24V |
DIR+ | 方向正输入 | 输入电压范围5˜24V |
DIR- | 方向负输入 | 输入电压范围5˜24V |
EN+ | 使能正输入 | 该信号有效时,电机处于自由状态 |
EN- | 使能负输入 | 该信号有效时,电机处于自由状态 |
V+ | 电源正极 | DC:24˜110V(注意不要接反) AC18˜80V |
V- | 电源负极 | DC:24˜110V(注意不要接反) AC18˜80V |
ALM+ | 报警信号正输出 | 驱动器故障保护后输 出信号给上位机 |
ALM- | 报警信号负输出 | |
Pend+ | 到位信号正输出 | 电机到位后驱动器输出信号给上位机 |
Pend- | 到位信号负输出 |
外形尺寸图(单位:mm)


18825289603




 全部产品分类
全部产品分类
 在线咨询
在线咨询
 18825289603
18825289603 
